6 Dof Robot Arm End Effector Position Control with Inverse Kinematics and ROS2 Control

3D printed 6-Axis Robot with inverse kinematicsПодробнее

Trajectory Planning for Robot ManipulatorsПодробнее

6-DOF Robotic Arm with Inverse KinematicsПодробнее

Inverse Kinematics of 6 DOF Robotic Arm Simulation | Gazebo ROSПодробнее

Kinematics of a robotic arm (6DOF)Подробнее

Robot Arm with 6 DOF - ROS Noetic and MoveitПодробнее

Inverse Kinematics and Trajectory Execution of a robot manipulator using ROS Moveit and Arduino.Подробнее

How to cheat at Inverse KinematicsПодробнее

Control PR2 Arm Movements Using ROS Actions and Inverse Kinematics - MATLAB VideoПодробнее

[HCMUTE][DRC][2021B]Control of a 6DOF robot using ROS and an intelligent Inverse Kinematic AlgorithmПодробнее
![[HCMUTE][DRC][2021B]Control of a 6DOF robot using ROS and an intelligent Inverse Kinematic Algorithm](https://img.youtube.com/vi/i4fPv4PPHcM/0.jpg)
ROS based 6 DOF Robotic Arm Custom Developed for a Client!! Complete Walkthrough and DemoПодробнее

2 DOF Robotic Arm - Senior Design Project (Z. Guy)Подробнее

6DOF Robotic Arm Kinematic's with ROS and PythonПодробнее

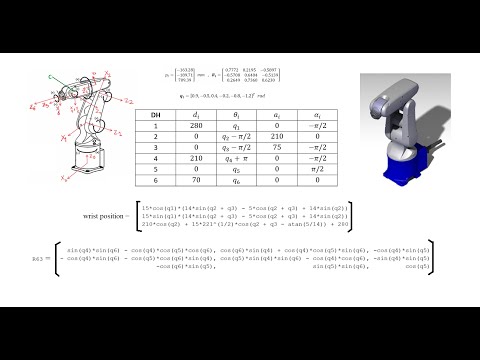
Analytical Inverse Kinematics of 6DOF Denso ArmПодробнее
Robot Leg Control using Python and ROSПодробнее

6DoF Arm using Forward and Inverse Kinematics in ROS and GazeboПодробнее

Singularity behavior during kinematic control of a 6-dof robot armПодробнее

SYSC 4206 Lecture 7: Inverse kinematics 2, 6DOF robot arm with spherical wristПодробнее

Two link robotic manipulator modelling and simulation on MatlabПодробнее
