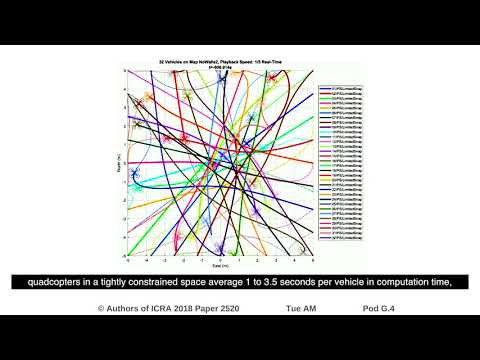
An Efficient Algorithm for Optimal Trajectory Generation for Heterogeneous Multi-Agent Systems in No
Optimal trajectory generation for dynamic street scenarios in a Frenet FrameПодробнее
Time and Energy Optimized Trajectory Generation for Multi-Agent Constellation ChangesПодробнее

Cooperative Multi-Agent Trajectory Generation with Modular Bayesian OptimizationПодробнее

MT-LQG: Multi-Agent Trajectory-Optimized LQGПодробнее

Summary video: Enhancing Bilevel Optimization for UAV Trajectory Generation using a Duality GapПодробнее

CFS Algorithm for Multi Agent PlanningПодробнее

ASAP for Trajectory Planning of Heterogeneous Multi-Agent SystemsПодробнее

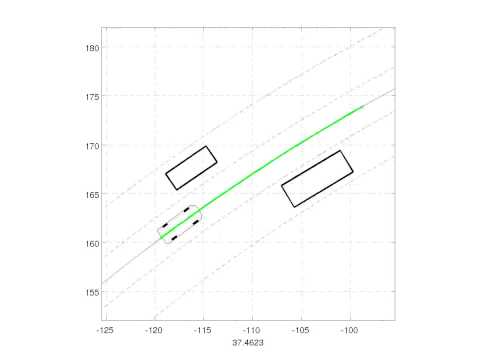
Figure 2: 8 Heterogeneous Quadcopters in a MazeПодробнее

Bonus Animation 1: 16 Homogeneous Quadcopters in a MazeПодробнее

Comparation between trajectories after PSO parameter optimizationПодробнее

Vision-Based Minimum-Time Trajectory GenerationПодробнее

Explainable Multi-Agent Motion PlanningПодробнее

(ICRA) Efficient Multi-Agent Trajectory Planning with Feasibility Guarantee Relative Bernstein PolynПодробнее

Trajectory Planning for Heterogeneous Robot TeamsПодробнее

Hold Or take Optimal Plan: A quadratic programming approach to multi-robot trajectory generationПодробнее

Online Smooth Trajectory Generation using Generalized Shape Expansion in Unknown EnvironmentsПодробнее

SoCS 2020: Cooperative Path Planning for Heterogeneous AgentsПодробнее

Time Optimal Point To Point TrajectoriesПодробнее
