ECE320 Lecture 9-2b: Discrete-Time Systems - State Variable Feedback

ECE320 Lecture 9-1a: Discrete-Time System Design - State EquationsПодробнее

ECE320 Lecture6-2a: State Variable Feedback Transfer FunctionsПодробнее

ECE320 Lecture 9-1b: Discrete-Time System Design - State EquationsПодробнее

ECE320 Lecture10-2a: Discrete-time Systems DesignПодробнее
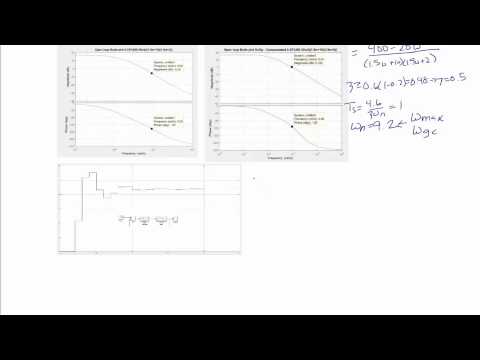
ECE320 Lecture10-2c: Discrete-time Systems DesignПодробнее

ECE320 Lecture7-2b: Discrete-Time Systems: z-TransformsПодробнее

ECE320 Lecture7-1a: Discrete-time Systems: Convolution SystemПодробнее

State Space representation of Discrete Time Systems 3 | Digital ControlПодробнее

ECE320 Lecture10-1b: Discrete-Time Systems - Transfer Function ControlПодробнее

ECE320 Lecture10-2d: Discrete-Time Systems ControlПодробнее
State Variable Analysis in Discrete Time Domain - State Space Analysis - Control SystemsПодробнее

Discrete-Time Dynamical SystemsПодробнее

ECE320 Lecture10-1a: Discrete-Time Systems - Transfer Function ControlПодробнее
State Space Representation of Discrete Time SystemsПодробнее
