Encoder and IMU Based Localization for a Small Car Robot

Pose Tracking with Encoder and IMU sensorПодробнее

ROS Developers Live-Class #51: How to fuse Odometry & IMU using Robot Localization PackageПодробнее

Scaled Car Localisation and Control using IMU and Wheel EncodersПодробнее

Wheel Encoder, 2D LIDAR, RGBD, IMU fusionПодробнее

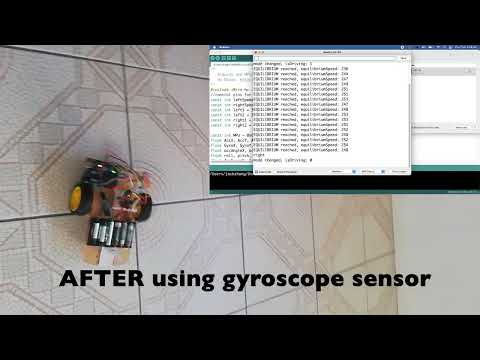
How to makes a robot car drive straight and turn exact right angles with MPU6050 gyroscope sensorПодробнее
Using encoder ticks for localizationПодробнее

Localization (fusing odm of encoders with IMU data).Подробнее

Encoder and IMU based control of Autonomous RobotПодробнее

IMU and Wheel Odometry FusedПодробнее

Closed-loop motor encoder and IMU by Diego C.Подробнее

Autonomous Navigation of a Mobile Robot using GPS Sensor in ROSПодробнее

''LINDO" - Localization Intial Tests Using IMU and EncodersПодробнее

Extrinsic Calibration and Fusion Localization For Camera-IMU-Wheel Encoder System - kaist 39Подробнее

Encoders vs Encoders + IMUПодробнее

Robot Localization from Fiducials TestПодробнее

Behavior tree framework for global localization using lidar, GPS, wheel encoder and IMUПодробнее

Odometry, encoders and position measurements, arduinoПодробнее

Using IMU and Encoder feedback for path traversalПодробнее

Automated control system for mobile robot with usage of LIDAR technologyПодробнее
