ORB SLAM using rgbd dataset freiburg2 desk bag

RTAB-Map using rgbd dataset freiburg2 desk bagПодробнее

ORB SLAM2 using datasetrgbd dataset freiburg2_pioneer_360Подробнее

ORB SLAM2 using dataset freiburg2 pioneer slam2Подробнее

orbslam3 ros euroc stereo imu datasetПодробнее

walking orbslam2(RGBD)Подробнее

ORB SLAM2 using rgbd dataset freiburg2 desk bagПодробнее

Mobile Robotics 12: Test ORB SLAM 2: Run RGBD SLAM Example TUM DatasetПодробнее

ORB-SLAM2 running on TUM RGB-D DatasetПодробнее

ORB Slam on our RRC2 dataset. Gets lost but is relocalizedПодробнее

Testing Python SLAM with ORB Features (accelerated)Подробнее

Localization of TartanAir Dataset using ORB SLAM3 and GTSAMПодробнее

rgbdslam using rosbagПодробнее

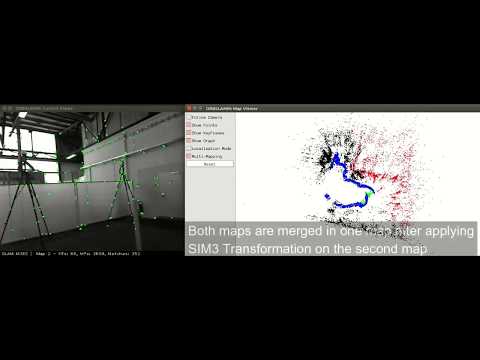
ORBSLAMM Running on TUM RGBD sequence fr2_large_with_loopПодробнее
Monocular SLAM with ORB-SLAM3 and Raspberry Pi Camera Module V2Подробнее

ORB-SLAM in the KITTI dataset (Sequence 00)Подробнее

ORB-SLAM in a dynamic sceneПодробнее

ORB SLAM + Introspection by Rabiee & Biswas tested on TartanAir DatasetПодробнее
