ORB SLAM2 on ROS2

Mapping with the drone Tello and ORB-SLAM2Подробнее

ORB SLAM 2 | Simulating with ROSПодробнее

ORB SLAM2Подробнее

Comparison of Visual SLAM Algorithms ORB-SLAM2, RTAB-Map and SPTAM in indoor and outdoor with ROS.Подробнее

Monocular SLAM with ORB-SLAM3 and Raspberry Pi Camera Module V2Подробнее

orb slam2 ros2 galactic dji tello after kalibr calibrationПодробнее

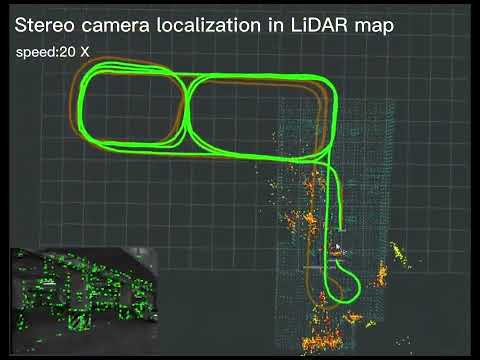
Stereo Camera Localization in Lidar Map (ORB-SLAM2)Подробнее
MEng Final Year Project - Autonomous Robot with monocular ORB-SLAM2Подробнее
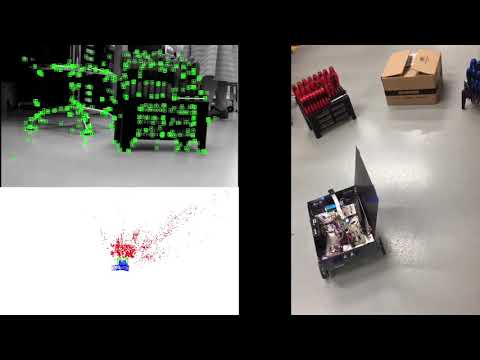
ORB SLAM 2 ROS STEREO DEMOПодробнее

ROS ORB SLAM2Подробнее

orb slam2 without rosПодробнее

ORB-SLAM2 running with ROS using RGB-D Tum Dataset(freiburg3 walking static)Подробнее

ORB SLAM2 Localization with Stereo CameraПодробнее

AirSim + ORB-SLAM2Подробнее

orb slam2 and dji telloПодробнее

Live stereo camera ORB-SLAM2 with Duo3D cameraПодробнее

ORB SLAM2 - Living Room Test - Monocular Relocalization From Saved MapПодробнее

ORB-SLAM2 on PiCamera sequenceПодробнее

Running ORB-SLAM2 with ROS on self-collected dataset using Realsense D435iПодробнее

Stability-scale estimation for monocular ORB-SLAM 2 | Parrot Bebop 2Подробнее
