Robot Grasping Control Techniques

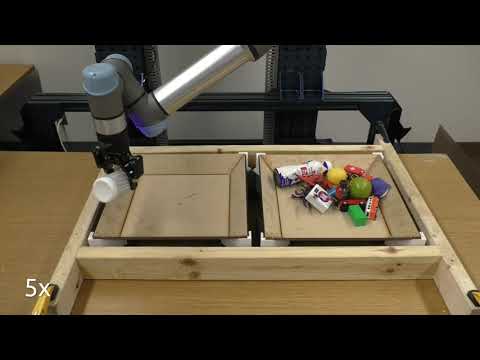
Learning a visuomotor controller for real world robotic grasping using easily simulated depth imagesПодробнее

Learning a visuomotor controller for real world robotic grasping using easily simulated depth imagesПодробнее

Robot Hand Grasp ControlПодробнее

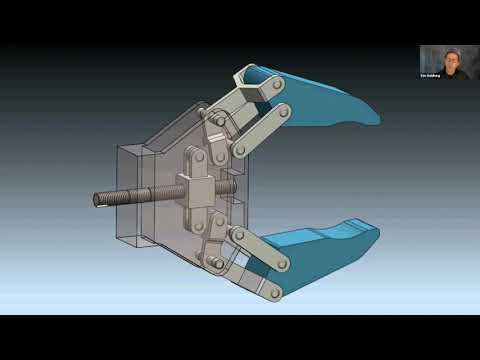
myGripper H100 | The 3-Finger Force-Controlled Dexterous Gripper for Flexible and Precise HandlingПодробнее

Learning Continuous Control Actions for Robotic Grasping with Reinforcement LearningПодробнее

Stanford Seminar - Hands in the Real World: Grasping Outside the LabПодробнее

The Shadow Smart Grasping SystemПодробнее

MIT 6.S191 (2020): Generalizable Autonomy for Robot ManipulationПодробнее

Sample Efficient Robot Grasp LearningПодробнее
Robotic grasp control with high-resolution combined tactile and proximity sensingПодробнее

A binary decision-making algorithm for force control in robotic grasping with a parallel gripperПодробнее

grasping force control-shadow robot handПодробнее

UofT Robotics Institute Seminar Series: Ken Goldberg "New Wave of Robot Grasping"Подробнее
COROMA ONLINE COURSE: Learning to GraspПодробнее
Grasp controlПодробнее

Deep learning-based method for vision-guided robotic grasping of unknown objects.Подробнее

EMG based control of robotic arm - Grasp & MoveПодробнее

MIT Robotics - Ken Goldberg - The New Wave in Robot GraspingПодробнее

Robotic grasp control with high-resolution combined tactile and proximity sensingПодробнее

Direction of Slip Detection for Adaptive Grasp Force Control with a Dexterous Robotic HandПодробнее

argallab :: Grasp Detection for Assistive Robotic ManipulationПодробнее
