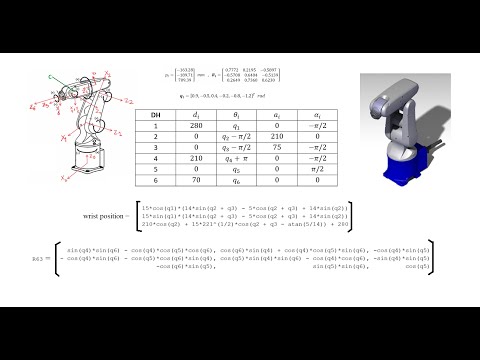
6 Axis Robot Forward & Inverse Kinematics Tutorial - Denavit Hartenberg Parameters With the AR4-MK2
6 Axis Robot Forward & Inverse Kinematics Tutorial - Denavit Hartenberg Parameters With the AR4-MK2Подробнее
How Robots Use Maths to MoveПодробнее

Analytical Inverse Kinematics of 6DOF Denso ArmПодробнее
Denavit-Hartenberg Reference Frame LayoutПодробнее

Denavit–Hartenberg parameters of a 3-link manipulator with prismatic joint - ExampleПодробнее

Introduction to DH ConventionПодробнее

3D printed 6-Axis Robot with inverse kinematicsПодробнее

Robotic Arms: Kinematics, Matrix Multiplication and DH TablesПодробнее

DH parameters with forward and inverse kinematicsПодробнее

Forward and inverse kinematics #robotics #kinematics #animationПодробнее

Intro2Robotics Lecture 7b: Forward to Inverse Kinematics exampleПодробнее

Analytical Forward and Inverse Kinematics for Stanford ArmПодробнее

Forward Kinematics (with solved examples) | Homogeneous Transformations | Robotics 101Подробнее

Denavit - Hartenberg (DH) Tables For Robotic Systems - Direct Kinematics IIПодробнее
