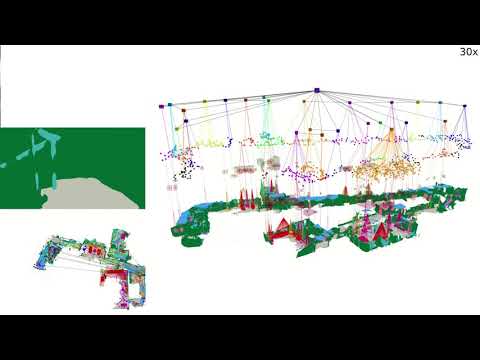
Kimera-Multi: Medfield Demonstration

SLAM on Docker | Kimera-VIOПодробнее

Kimera VIO Deployment in Custom Stack with Realsense D455Подробнее

CASE2024: Learning Robot Skills From Demonstration for Multi-Agent PlanningПодробнее

Kimera-Multi: a System for Distributed Multi-Robot Metric-Semantic SLAMПодробнее

MultiSLAMПодробнее

Metric-Semantic SLAM with Kimera: A Hands On TutorialПодробнее

Kimera: an Open-Source Library for Real-Time Metric-Semantic Localization and MappingПодробнее

Guest Lecture by Antoni Rosinol - Kimera: From Classical SLAM to 3D Spatial PerceptionПодробнее

Automated 3D Scanning with Collaborative RobotsПодробнее

Hydra: A Real-time Spatial Perception System for 3D Scene Graph Construction and OptimizationПодробнее
Distributed Visual-Inertial Cooperative Localization - DemonstrationПодробнее

Collaborative robots at Magneti MarelliПодробнее

Demo: Automated electronics assembly cell for tight spacesПодробнее

3D Measurement with Collaborative RobotsПодробнее

Resilient and Distributed Multi-Robot Visual SLAM: Datasets, Experiments, and Lessons LearnedПодробнее

MIT Robotics - Katerina Fragkiadaki - Modular 3D neural scene representationsПодробнее

Cooperative Multi-Robot Systems - Jeff Shamma, UIUC (FoRCE Seminars)Подробнее
